Turtlebot3 SLAM
ROS | Python | Turtlebot3 | SLAM | Autonomous Exploration | AMCL
December 2020
Description
In this project, I programmed Turtlebot3 robot to autonomously explore and map a simulated environment, using SLAM toolbox and autonomous exploration algorithm.
Take a look at the project on my GitHub page.
The Turtlebot exploring a scene in Rviz (speed X5)
Overview
This projects contained 4 parts:
- Manually mapping the Gazebo workspace using `turtlebot3_teleop`.
- Localizing and moving the turtlebot using `AMCL` ROS navigation stack with the map created in the previous step.
- Mapping the workspace while navigating (manual navigation).
- Autonomously mapping the environment.
In the following video, I manually moved the turtlebot in a previous created map:
Moving the turtlebot using previous created map (speed X2)
In the following video, the turtlebot maps the workspace while navigating between manually insert goal-points:
Mapping the workspace while navigating (speed X2)
In the forth part, I used goal-points on the edge of the explored map to make the turtlebot map the workspace. For the exploration, I used Frontier Exploration algorithm.
In the following video, the turtlebot maps the workspace autonomously. The generated map presented below it:
Autonomously mapping the environment (speed X10)
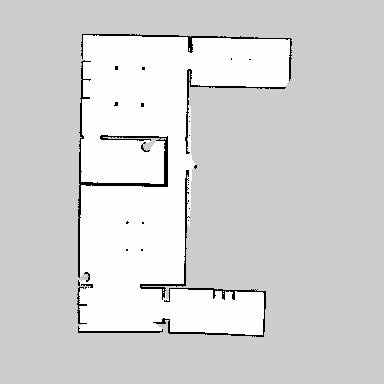
The map generated